
Frézovanie po dráhe
Tomuto cyklu predbieha Vytvorenie novej kontúry.
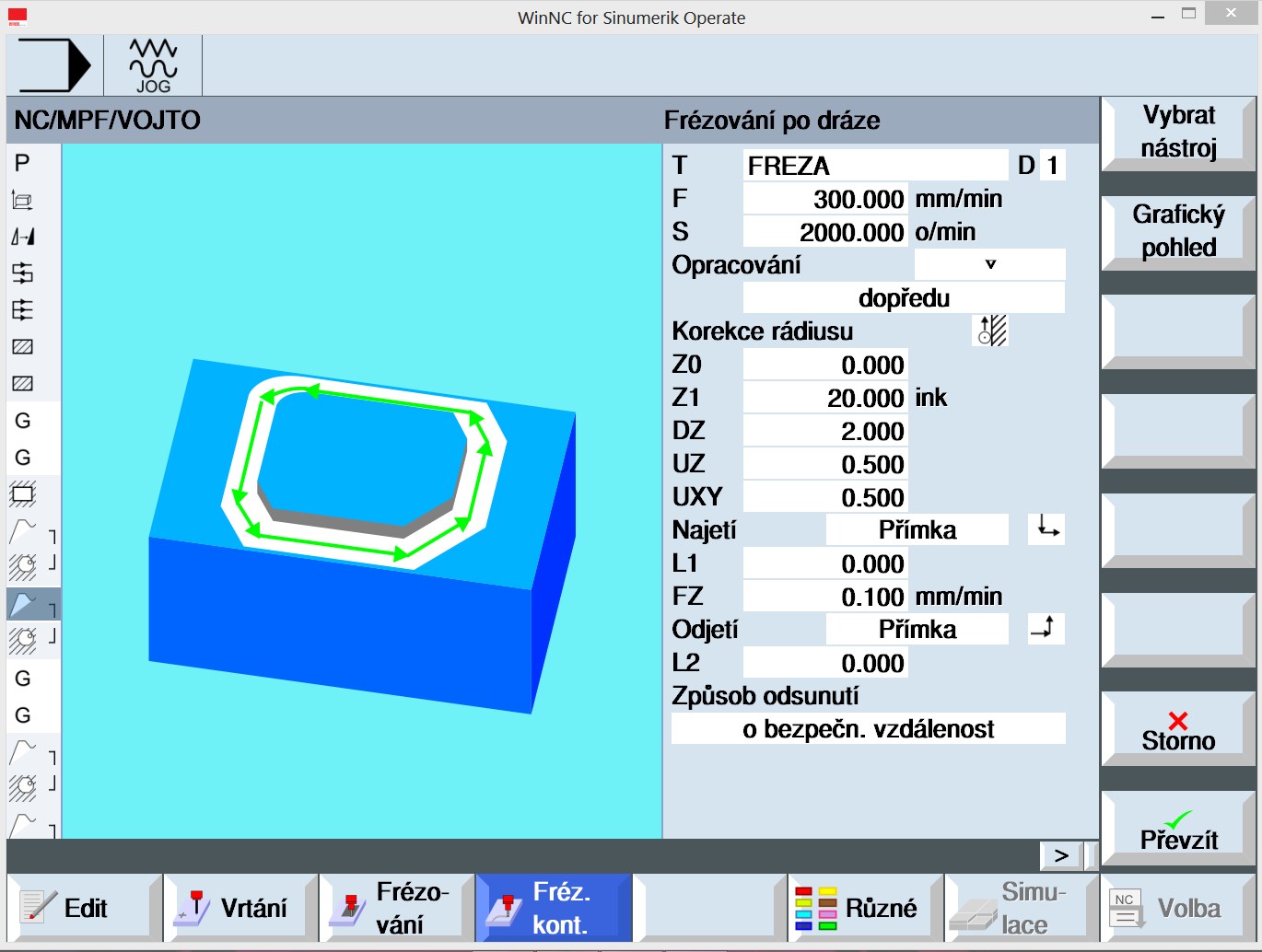
Popis cyklu:
|
Tabuľka:
| Parameter | Popis | Jednotka |
| T | Názov nástroja | |
| D | Číslo hrotu | |
| F | Posuv |
mm/min mm/zub |
| S/V | Otáčky vretena alebo konštantná rezná rýchlosť |
ot/min m/min |
| Opracovanie |
-hrubovanie -obrobenie načisto -skosenie hrán |
|
| Korekcie polomeru nástroja |
-Vľavo (obrábanie vľavo od kontúry) -Vpravo (obrábanie vpravo od kontúry) -vypnutá Zvislý príchod je možné použiť pri uzatvorených kontúrach. |
|
| Z0 |
Vzťažný bod Z (abs. alebo ink.) mm |
mm |
| Z1 | Konečná hĺbka (abs) alebo konečná hĺbka vztiahnutá k Z0 | mm |
| DZ | Max. hĺbkový prísuv | mm |
| UZ | Rozmer obrobenia načisto | mm |
| FS | Šírka skosenia hrán | mm |
| ZFS | Hĺbka zanorenia hrotu nástroja (abs. alebo inkr.) | mm |
| UXY | Rozmer obrobenia roviny načisto | mm |
| Režim príjazdu |
Režim príjazdu do roviny -Priamka: Skosenie priestoru -Štvrťkruh: Časť špirály (iba po frézovanej dráhe vľavo a vpravo od kontúry -Polkruh: Časť špirály (iba po frézovanej dráhe vľavo a vpravo od kontúry) -Kolmo: Kolmo ku dráhe ( po dráhe stredu) |
|
| Stratégia príjazdu |
-Po osách -Priestorovo |
|
| R1 |
Polomer príjazdu |
mm |
| L1 |
Dĺžka príjazdu |
mm |
| Režim odjazdu |
Režim odjazdu do roviny: -Priamka: Skosenie priestoru -Štvrťkruh: Časť špirály (iba po frézovanej dráhe vľavo a vpravo od kontúry -Polkruh: Časť špirály (iba po frézovanej dráhe vľavo a vpravo od kontúry) -Kolmo: Kolmo ku dráhe ( po dráhe stredu) |
|
| Stratégia odjazdu |
-Po osách -Priestorovo |
|
| R2 |
Polomer odjazdu |
mm |
| L2 |
Dĺžka odjazdu |
mm |
| Režim zdvíhania |
Ak je nutné viacej bodov zanorenia, dá sa naprogramovať výška spätného pohybu. -o bezpečnú vzdialensoť -do RP retraction plane -Žiadný spätný pohyb -Z0 + bezpečná vzdialenosť |
|
| FR |
Posuv spätného pohybu pre medzi polohovanie |
.